液压传动具有显著的优点,相比机械传动,液压传动布置灵活、能够实现远距离传动、易于实现电气控制;相比电气传动,液压传动的功率密度大、传动刚度高、易于实现大功率的精确控制,所以,液压传动广泛应用于各种施工机械中。以工程机械为例,几乎所有的工作装置和大部分行走装置都采用液压传动。
液压传动系统不仅起动力传动作用,还起到执行机构的调速作用,在工程机械中,工作装置由液压缸或液压马达驱动,工作装置的速度或转速由液压系统的流量决定。操作人员通过控制液压系统的流量来控制工作装置的速度,进而操作机械进行施工作业。
液压系统的调速方式包括泵控调速和阀控调速两种,所谓泵控调速是指通过控制液压泵的排量来调节液压系统的流量,进而调节执行机构的速度;所谓阀控调速是指通过控制液压阀的开度来调节液压系统的流量,进而调节执行机构的速度。
在阀控液压系统中,比例阀是流量控制的核心元件,目前的比例流量控制阀基本都是液控的,即通过液压先导压力控制主阀的开度,并通过辅助阀组消除负载变化等因素对流量的干扰,实现流量对负载扰动的自适应。
由于液压阀的机械机构和对液体流动的阻力作用,液控比例阀存在加工难度大、动态响应慢、参数不能随控制要求变化等缺陷。文中研究了一种通过电控的比例流量控制阀,不但实现了目前液控比例阀的所有功能,还具有加工难度低、动态响应快、参数可随控制要求变化等优点。
1 电控比例流量控制阀的总体方案
电控比例流量控制阀包含两个可独立控制的节流阀、压力传感器和控制器,系统的总体方案如图1所示。

图1 电控比例流量控制阀的总体方案图
设定比例阀的额定参数为流量Qo,压差Δpo,电流io
 (1)
(1)
当压差为Δp时,为使流量达到Q的电流i满足:

 (2)
(2)
因此
 (3)
(3)
液压马达和液压缸的速度通过阀来控制时,泵的流量QP大于通过阀设定的流量QL(QP>QL),经过阀的负载流量QL以外的剩余流量QB=QP-QL通过流量阀流出。
为了使动力损失降到最小限度,通过控制泵流量来减小溢流量QB。
2 电控比例流量控制阀的压差恒定控制方法
下面讨论图2中的负载流量QL不随负荷压力pL变化而变化的控制方法,当负载压力pL发生变化时压差Δp=p1-pL保持恒定的方法。
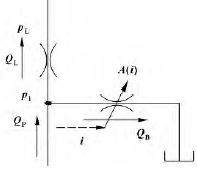
图2 主阀流量恒定控制回路图
2.1 阀流量恒定控制
若图2中负载压力pL上升,压差p1-pL变小,负载流量QL降低。
此时,降低电流i使流通面积A(i)减少,压力p1上升。压力p1上升,就可控制负载的流量QL与负载压力pL上升前保持相同。
同样的,当负载压力pL降低时,增加电流i使流通面积A(i)增大,压力p1降低,负载的流量QL也能与负载压力pL减小前保持相同。控制方案图如图3所示。
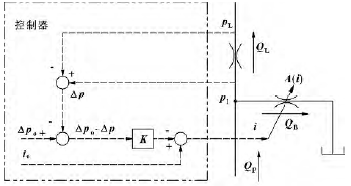
图3 主阀流量恒定控制方案图
控制方法为反馈控制,检测出实际压力pL、p1,计算出压差Δp=p1-pL并且与目标值Δpo进行比较,二者之间的差值Δpo-Δp所对应的电流Δi加上电流io控制旁通流量即可。
负载压力pL上升,Δpo-Δp增加,旁通阀节流,流量QB降低,压力p1增大。相反,负载pL压力降低,旁通阀开大流量QB增加,压力p1降低,这样就可以使压差Δp=p1-pL与目标值趋于一致。
增益K(PID)的设定。增益由负载压力pL变化幅度、变化的速度以及旁通阀的压力流量特性、动作点QB、p1决定。旁通阀的压力流量特性为非线性的,需要用仿真来确定增益K。后面将进行具体仿真。
2.2 主阀压差恒定的控制
下面研究图4所示的主阀压力差Δp=p1-pL不随着负载压力pL与主阀面积a的变化而变化的控制方法。
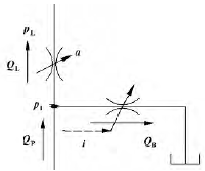
图4 主阀压差恒定的控制回路图
控制对象:
工作点流量为:
 (8)
(8)
 (9)
(9)
当主阀的面积a发生da的变化、负载压力pL发生dpL的变化时,计算主阀的压力差Δp的变化量dΔp:
因控制对象是非线性的,若工作点不同,即使主阀的面积变化da与负载压力变化dpL相同,主阀的压力差的变化dΔp也不同,A为主阀的最大面积。
表1所示为工作点QBo、QLo、p1o、pLo、ao与变化率 、∂Δp/∂(a/A)的关系。
、∂Δp/∂(a/A)的关系。
表1 工作点与变化率的关系表
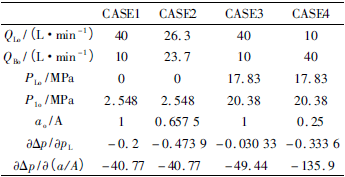
负载压力变化dpL影响最大的是实例2,最小的是实例3。
主阀的面积变化da影响最大的是实例4,最小的是实例1。
控制对象的增益随工作点变化而发生很大变化,因此某特定的实例中即使设定了最适合的PID值,其值对于其他的例子可能不稳定,或是响应缓慢。即此PID值对于其他实例不一定适合。
分析表1中的CASE1、CASE2、CASE3、CASE4四种实例PID控制器的设定,研究如何使所有的情况达到良好的控制性能。
控制系统工作,通过反馈控制,检测出压力pL、p1,计算压力差与目标值Δpo进行对比,把与目标值的差值Δpo-Δp对应的负电流-Δi输入旁通阀,通过控制旁通阀的流量来调整压差Δp。
若负载压力pL增加,导致Δpo-Δp增加,旁通阀关小,p1增加。相对,负载压力pL降低,旁通阀打开,压力p1降低,压力差Δp=p1-pL就会逐渐与目标值Δpo接近。
因主阀与旁通阀的压力流量特性是非线性的,所以应用仿真对PID控制器进行研究。
3 电控比例流量控制阀的仿真试验
控制器对节流阀的流量进行PID控制,下面通过仿真试验的方法测试不同的PID参数对流量的控制效果。进行了CASE2、CASE1两种情况的仿真,通过各种实例对PID参数进行整定,研究适合于全部情况的PID参数值。
3.1 CASE2的仿真
给定负载压力等参数,如下:
负载压力:pL=0;
主阀通流面积:a/A=0.7(最大开度7.5mm的70%行程);
主阀流量:QL=28.0L/min;
主阀压力差:Δp=p1-pL=2.5MPa。
PID的控制参数。影响稳定性的主要控制参数为:
稳定极限:pL=1.019MPa;
振动频率为20Hz;
PID的控制参数KP=0.0109Io(mA/MPa)
式中:Io为旁通阀的额定电流(mA)。
影响精度与响应性能的主要参数为:控制电流增益的设定值I。
PID的控制参数KI=72.74Io(mA/MPa)
根据主阀流量恒定控制方案及设定的控制参数,确定了PID传递函数,见图5。仿真结果见图6。

图5 PID传递函数图

图6 实例2的仿真结果图
增大PID中的KI响应性增加了,但是受到旁通阀的响应性能的限制,旁通阀流量的增加很缓慢,最开始压力p1会上升到5.5MPa,主阀流量QL会增加到43L/min,压力差Δp在0.1s后稳定在2.5MPa。
3.2 CASE1的仿真
负载压力:pL=0;
主阀通流面积:a/A=1(最大开度7.5mm行程);
主阀流量:QL=40L/min;
主阀压力差:Δp=p1-pL=2.5MPa。
PID参数与CASE2相同,仿真结果参照图7。
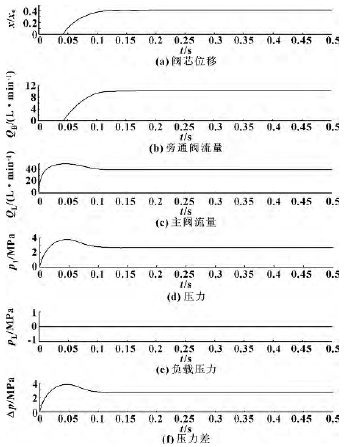
图7 实例1的仿真结果图
CASE1响应速度较低,各参数在t=0.15~0.2s后处于稳定,压力差Δp在t=0.2s后稳定到2.5MPa。
4 结论
在阀控液压系统中,比例阀是流量控制的核心元件,目前的比例流量控制阀基本都是液控的,由于液压阀的机械机构和对液体流动的阻力作用,液控比例阀存在加工难度大、动态响应慢、参数不能随控制要求变化等缺陷。文中研究了一种电控比例流量控制阀,突破了滑阀的结构,采用两个可以独立控制的电比例节流阀,利用压力传感器采集节流阀进出口的压力,通过控制器对电比例节流阀进行压力—流量的联合控制。根据新型电比例流量阀的体系结构,推导了变负载下压差恒定的流量控制算法,并通过仿真测试对PID控制参数进行整定,优化了系统方案和控制算法。在起重机臂架上进行了实机测试,提高了方案的实用价值。
