基于CANopen协议的电动执行机构设计
1 引言
电动执行机构是工业过程控制系统不可缺少的部分,被广泛用于石油化工、电厂等领域。近年来,伴随着微电子技术和控制技术的迅速发展,电动执行机构也获得了快速的发展,国外一些生产厂商在这几年中相继推出了常规的、带现场总线通信协议的总线型电动执行机构。而国内起步晚,目前生产的主要是常规的电动执行机构,它采取传统的现场接线方式,如每台电动执行机构至少需要通过7~14根控制线才能将其参数传递到控制系统的控制模板上。这种方式安装、维护代价高,系统的可扩展性差,且易受现场操作人员的技术水平、精神状态及工作情绪等人为因素的影响,误操作较多。另外,对于一些有着特殊要求的环境,如易燃易爆、辐射、或人们不易到达的地方,这种传统控制方式难以胜任。为解决上述问题就要求执行机构向数字化、智能化、网络化方向发展。鉴于此,本文提出了一种基于CAN open协议的电动执行机构设计方案。
2 设计方案概述
CAN open协议是一种在欧洲非常流行的CAN高层协议,该协议清晰、透明、精炼,便于系统配置和功能重构,在工业控制中有着良好的应用前景。本文提出的设计方案是在常规电动执行机构设计中加入CAN总线通讯模块,使其成为一种具备总线通讯能力的智能电动执行机构。这种智能电动执行机构采取总线控制方式,只需通过2根信号线就能完成所有信息的传输,更重要的是由于其具备了总线通讯功能,操作人员只需在控制室就可对执行机构实行远程控制。
3 电动执行机构硬件设计
电动执行机构硬件设计是建立在了解其基本架构的基础之上的,为此,在硬件设计前先简要介绍一下电动执行机构的架构。
1)电动执行机构的架构电动执行机构是根据调节器(或上位机)给出的控制信号产生推力或位移的一种装置,主要由控制器、伺服电机、位置检测装置和减速器四部分组成,其构成如图1所示。
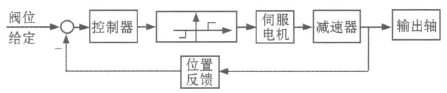
图1 电动执行机构的架构
控制器采集阀位给定信号和位置反馈信号,阀位给定信号由上位调节装置经总线系统发送,由现场总线接口接收。减速输出的信号经位置检测装置后形成位置反馈信号送给控制器,控制器输出经过一个采用晶闸管作为开关元件的继电器非线性环节去控制电机的运转,电机带动减速器来驱动输出轴产生相应的位移。
2)控制器的硬件设计控制器系统硬件由电动执行机构控制单元和CAN总线接口单元组成,如图2所示。
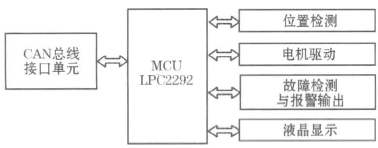
图2 控制器的硬件结构
整个电动执行机构设计采用模块化设计,选用LPC2292作为这两个单元模块的中央处理器。LPC2292是Philip公司的内嵌有CAN控制器的高性能单片机,工作频率高达30MHz,非常适合用于总线控制系统。电动执行机构控制单元含位置检测电路、电机驱动电路、故障检测/报警电路及液晶显示电路。位置检测电路用导电塑料精密旋转电位器作为位置传感器,电机驱动电路由固态继电器和正反互锁逻辑电路组成,完成电机的正反转启动、停止等控制。故障检测/报警输出电路经光电隔离电路采集限位、过热等报警信号,输出报警信息;液晶显示采用128*128,4级灰度的点阵液晶屏,液晶界面为现场操作人员提供了良好的操作平台。
CAN通讯接口单元是总线型智能电动执行机构硬件上所特有的,它提供了总线访问的接口,其电路,如图3所示。
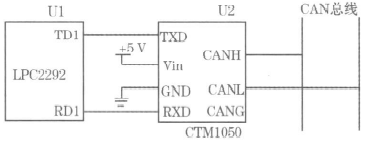
图3 CAN通讯接口电路
电路中收发器模块选用带隔离功能的CTM1050芯片,通过它可以很好地实现CAN总线上各节点电气、电源之间的完全隔离和独立,极大地提高了CAN节点的稳定性和抗干扰性。
4 电动执行机构的软件设计
电动执行机构软件设计主要包括两方面:执行机构的控制程序和基于CANopen协议的CAN总线通讯程序。其中,控制程序主要实现阀门的位置控制功能,包含初始化、数据采集、处理及显示等几部分,且在常规型电动执行机构中都已实现,不再赘述。本部分将重点介绍基于CANopen协议的CAN总线通讯程序设计,根据CANopen协议描述[4-5],把这部分程序设计分为对象字典的设计和CANopen通讯程序设计两部分,而后者是难点。
1)CANopen协议通信机理
CAN协议只定义了物理层和数据链路层两个底层协议,而CANopen协议在其基础上规定了应用层协议,其通信模型,如图4所示。
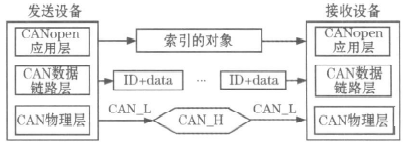
图4 CANopen通讯模型
在CAN open的应用层,设备间通过相互交换通信对象进行通信。考虑到工业自动化系统中数据流量的不同需要,CAN open定义了4类标准通信对象,分别为过程数据对象(PDO)、服务数据对象(SDO)、管理对象(NMT)和特殊功能对象;其中,PDO对象主要用于传输实时数据,SDO对象用于传送配置信息,NMT对象用于实现对CANopen网络的管理,而特殊功能对象提供一些特殊服务。对这些通信对象的访问都是通过对象字典来实现。
2)对象字典的设计
对象字典(Object Dictionary)是CAN open协议的核心,它是一个有序的对象集合,包含了CAN open网络中设备的所有信息,每个设备的对象字典具有结构相同、内容不同的特点。
CAN open设备访问对象字典时,是通过一个16位索引和一个8位子索引的方式来寻址。由于对象字典包含条目众多,不可能一一列举,下面以使用最频繁的PDO对象为例,从其报文属性和数据封装两方面来介绍PDO对象的建立。根据电动执行机构的控制需求,定义了PDO报文属性,见表1。
表1 PDO报文属性
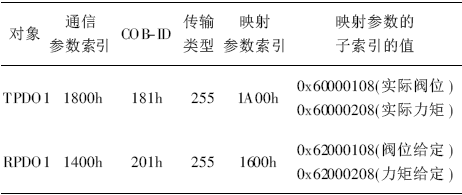
对于在CAN open网络中作为从节点的电动执行机构来说,TPDO是其发送给主节点的实时数据,而RPDO则是接收来自于主节点发送的数据或命令信息。由表1可知,每个TPDO和RPDO都包含2个对象字典条目:通信参数和映射参数。下面以TPDO1为例说明通信参数和映射参数的索引、子索引之间的关系,以及PDO对象的数据封装过程,详细流程,如图5所示。

图5 映射封装PDO
♂
由图5知,通信参数索引1800h下有5个子索引,分别规定了该PDO使用的COB_ID、传输类型、禁止时间及定时器周期等参数;而映射参数索引1A00h下有2个子索引,它们表示映射到该PDO中的2个对象,例如子索引1中的存放的是60000108h,表示把索引6000h,子索引01h,长度为8位的数据映射到TPDO1的第1个字节,而60000108h里存放的是用户规定的实际阀位值,当满足通讯参数中规定的传输类型时,实际阀位值就能通过TPDO1发送给CANopen网络主节点,从而实现主从节点之间的信息交互。
3)CANopen通讯程序设计
电动执行机构的CANopen通讯程序流程,如图6所示。
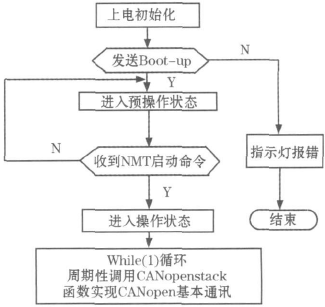
图6 CANopen通讯流程图
首先,执行机构上电初始化,待初始化完成后,它发送Boo-tup报文,同时其通信状态由初始化状态切换到预操作状态,该状态下仅能进行SDO通信;在收到NMT主节点的启动报文后,节点通信状态由预操作切换到操作状态,它是系统的正常工作状态,在该状态下执行机构应用程序循环调用CAN open stack函数实现CAN open基本通讯。
CAN open基本通讯主要包含以下三方面:实现CANopen状态转换机制、调用CAN报文收发函数处理NMT,PDO,SDO等报文,根据报文处理结果刷新实际输入和输出。其中,第二个方面是难点,因为CAN open规定的通讯报文种类较多,如何快速有效地对这些报文进行分类,并调用相应函数处理是保证系统实时性的关键。为此,在程序设计时采取了一种基于队列的分块存取报文处理模式,其基本思想,如图7所示。
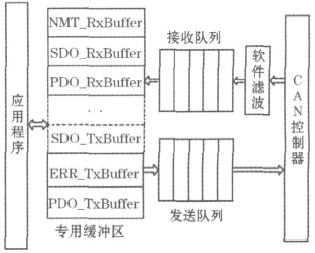
图7 基于队列的报文处理模式
程序中为在CAN open协议里规定的每种报文分配一个专用缓冲区,该缓冲区是应用程序与队列之间的公用接口;当需要发送报文时,应用程序先把待发送的报文按CANopen协议规定封装好,再写入相应缓冲区,然后依次入队,最后启动发送命令,报文出队并发送到总线上。接收报文时采用中断接收方式,为了减轻总线负载,设置了一个软件滤波环节,若收到的CAN报文满足软件滤波条件时才放入接收队列中。同时程序在不断扫描接收队列,若其中有报文则执行出列,出列后的报文根据其COB-ID,写入到对应的专用缓冲区中,应用程序从缓冲区中取出报文并进行后续处理。程序中定义了2个队列:接收队列和发送队列,队列采用顺序存储结构的循环队列。
具体代码如下:
#defineMAXsize16//循环队列长度
typedefstruct_CAN_MSG
{uCANTFIFrameInfo;//CAN报文帧信息
uCANIDmsgCANID;//CAN报文ID
uint8bDb[8];//CAN报文数据字节
}CAN_MSG;//CAN报文格式定义
typedefstruct_Queue
{CAN_MSGMsg[MAXsize];//存储CAN报文
intfront,rear;//队头、队尾指示器
boolRLock,WLock;//读、写队列允许标志
}Queue;//循环队列定义
QueueTxQueue,RxQueue;//定义发送、接收队列
为了增强程序的健壮性,在定义循环队列时,增加了队列读、写的允许标志位。队列的初始状态为front=rear=0,表示队列为空,当有新报文入队时,rear加1;同时若有报文出队,则front加1。初始时刻RLock=WLock=0,表示队列处于可读可写状态,报文在入队过程中保持WLock=1,入队完成后重置WLock=0,这样就避免了2条报文同时入队。RLock用于出队操作中,使用方法与WLock类似。
报文的发送和接收都有入队和出队操作,下面以接收报文的入队和出队为例,说明应用程序是如何对队列进行操作的。当通过中断方式接收到的报文满足滤波条件时,将调用函数gCB_CanBuffer-Msg执行入队操作,其部分代码如下:
voidgCB_CanBufferMsg(CAN_MSG*pMtsg)
{CAN_MSG*pEntry;
pEntry=gQue_PeekFree((Queue*)RxQueue);
/*获取报文在队列中的存储地址*/
if(pbEntry){//队列未满
memcpy(pEntry,pMtsg,sizeof(CAN_MSG));
/*入队操作*/
:
}
}
接收报文入队的详细操作流程,如图8所示。
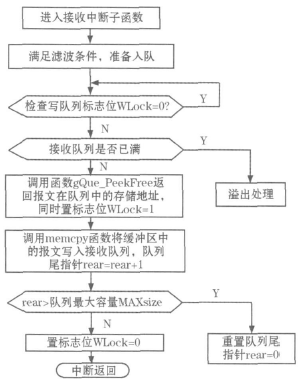
图8 接收报文入队流程图
相对于接收报文入队流程,其出队过程要简单一些。接收报文出队的详细操作流程如图9所示。
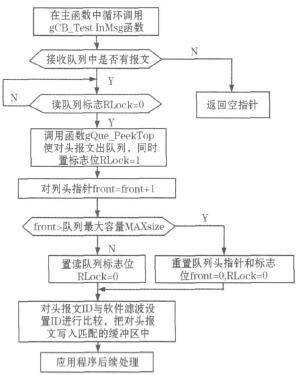
图9 接收报文出队流程图
♂
程序中通过函数gQue_IsElement检测接收队列,若其中有报文则队头元素出列,其部分代码如下:
voidgCB_TestInMsg(void)
{CAN_MSG*pMtsg;
if(!gQue_IsElement((Queue*)RxQueue)
{returnNO_MESSAGE;}
else{
pMtsg=gQue_PeekTop((Queue*)RxQueue);
/*队头报文出列*/
:
}
}
采用这种基于队列分块存储报文处理模式有以下两方面优点:首先,通过队列缓冲,避免了由于节点收发报文过于频繁,应用程序来不及处理而产生的丢包现象;其次,存储区按报文种类来分类,可以让应用程序快速存取,保证了系统的实时性。
5 应用实例
根据以上设计方案,构建了一个基于CANopen协议的电动执行机构现场总线控制系统,系统实物,如图10所示。
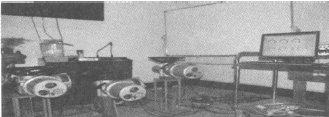
图10 系统实物图
该系统主要由电动执行机构、上位机、PCI_CAN智能通讯接口卡等几部分组成。其中,上位机和PCI_CAN通讯卡组合在一起作为CAN open网络的主节点,执行机构作为从节点,主从节点之间通过PDO来交换实时数据。为实现人机对话,利用VC++6。0设计了人机交互界面,如图11所示。
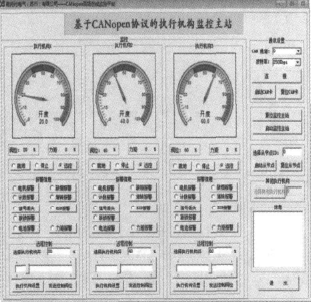
图11 人机界面
通过该人机界面不仅可以对每台电动执行机构的状态进行实时监控,而且还能对执行机构进行远程控制、参数标定、功能组态和故障诊断。
在系统运行过程中,对远程控制精度进行测试。初始时刻,把3台执行机构的零点和行程分别调整为0和5115,其对应阀门的0°~90°。上位机通过PDO给3台执行机构分别发送控制阀位0%,25%,50%,75%和100%,其预期的角度值分别为0°,22.5°,45°,67.5°,90°,而测试结果,见表2。
表2 控制精度测试结果
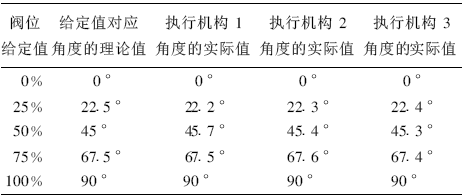
测试结果表明,3台执行机构的阀位给定值和实际值之间虽有一点小偏差,但经计算后发现它们的相对误差都在1%以下,可见远程控制精度还是很高的,能够满足实际控制精度需求。同时,在上述测试过程中,通过测试软件ZLGCANTest测得发送每条PDO报文的平均时间为2.283ms,表明系统实时性较好。另外,经初步成本核算,采用这种控制方式时,硬件成本节约了3.57%。通过这些数据表明本文提出的设计方案是合理可行的。
6 结语
本文针对常规型电动执行机构传统点对点连接方式存在的弊端,提出了基于CAN open协议的总线型电动执行机构设计方案。该方案通过把CAN open协议应用到执行机构的设计当中,使其具备总线通讯功能,合理有效地解决执行机构数据传输可靠性、远程网络通讯和操作维护困难等方面的问题。通过实际工程应用表明,这种总线型电动执行机构具有智能化、信息化、数字化等特点,实现了高可靠性、低成本的目标,其应用前景一片光明。
相关新闻
2、如涉及作品内容、版权和其它问题,请在30日内与本网联系,我们将在第一时间作出适当处理!有关作品版权事宜请联系:+86-571-88970062