阀门定位器阀位检测与压电阀驱动电路设计
1 前言
阀门定位器作为气动调节阀的主要附件,用来控制调节阀的阀位,实现执行机构的精确定位,从而提高调节阀的调节性能。
2 阀位控制系统
智能定位器阀位控制系统主要由微处理器、压电阀电气转换模块、气动调节阀、阀位检测模块构成。图1所示为定位器阀位控制系统框图。
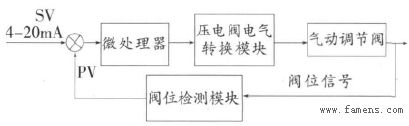
图1 定位器阀位控制框图
定位器接收上位机送来的4-20mA标准信号作为阀位设定信号SV;同时气动调节阀阀杆的上下移动通过阀位检测模块,将实际的阀位信号PV传给微处理器,微处理器将这两个信号(阀位设定信号SV与实际阀位信号PV)进行比较,并通过算法处理输出相应的PWM占空比信号来控制压电阀电气转换单元,电气转换单元把电信号转换成气动信号驱动执行机构动作,直至阀门到达给定值对应位置。
从阀位控制系统框图可以看出,阀位检测模块与压电阀电气转换模块在阀位控制系统占重要地位,这两个模块的精度决定了定位器整机的控制精度,因此本文就这两个模块的硬件电路设计做详细的介绍。
3 阀位检测模块
阀位检测模块的作用是将阀门位置实时地送入定位器中的微处理器,主要由阀位反馈连杆机构、阀位检测传感器与阀位检测电路组成。阀位检测精度直接决定了定位器的控制精度,因此重点介绍阀位检测传感器的选取与相应的阀位检测电路设计。
3.1 阀位检测传感器
阀位检测传感器是获取实时阀位信号的核心部件,在传感器选型时,须重点考虑其具有较高的位置反馈精度、正反方向值的一致性。本课题中采用的是高精度的特殊电位器,由于电位器中的电阻薄片是用特殊的不易磨损的导电塑料材质制成,因此,电位器可用于各种场合,连续动作而不致损坏。表1为本文采用的电位器性能参数表。
表1 电位器性能参数表

3.2 阀位检测电路设计
阀位检测电路是针对阀位检测传感器与实际应用情况来进行设计的。对于电位器传感器,首先要解决的是传感器激励源问题,激励源可采用电流激励源或电压激励源(即给电位器传感器恒压或恒电流使之正常工作),但无论是采用电流激励源或电压激励源都存在一定的波动,将导致电位器输出电压存在误差。
现以普通基准电压源给电位器供电举例来进行说明。图2为电位器传感器总阻值为R,供电电压为Vi,电位器总长为L,现滑动端在X位置,可算出输出电压 现在供电电源端有△Vi的波动,即现在的供电电压为
现在供电电源端有△Vi的波动,即现在的供电电压为 输出端对应的供电电压值为
输出端对应的供电电压值为 ,即供电电压波动△Vi将导致电压输出端存在
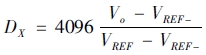
,即供电电压波动△Vi将导致电压输出端存在 的误差。本课题中拟采用AD转换器的基准电压作为电位器的供电电压,当可变电阻端滑在X位置处,Vo
的误差。本课题中拟采用AD转换器的基准电压作为电位器的供电电压,当可变电阻端滑在X位置处,Vo 这个电压需经过AD转换器转换成相对应的数字量Dx。
这个电压需经过AD转换器转换成相对应的数字量Dx。
 (1)
(1)
这里VREF-为0,AD转换器的分辨率为12位。所以 由上式可知:电位器每一个位置X对应一个AD转换器转换成的数字量Dx,电压VREF的波动,对测量精度不存在影响。上述可以得出,采用A/D转换器的基准电压给电位器传感器供电,可消除基准源波动的影响,使阀位检测更稳定。
由上式可知:电位器每一个位置X对应一个AD转换器转换成的数字量Dx,电压VREF的波动,对测量精度不存在影响。上述可以得出,采用A/D转换器的基准电压给电位器传感器供电,可消除基准源波动的影响,使阀位检测更稳定。
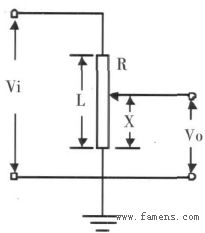
图2 电位器传感器
第二个要解决的问题是对电位器传感器可变电阻端输出信号的处理,即对Vo的处理。Vo是直流信号,所以这里设计了二阶低通有源滤波电路将其高频信号滤除,截止频率取30Hz。滤波后的信号经仪表放大器构成的电压跟随电路后送入AD转换器中进行处理。
图3是本课题设计的定位器阀位检测电路原理图,其中JP2是连接电位器传感器的接线端子,电位器的供电电压是由A/D转换器内部的基准电压4.096V提供,阀位检测电路核心芯片选用的是OP227仪用放大器[1],该芯片具有双通道、低噪声、低偏置电压80V等特点。R5、R6、C23、C29与放大器构成二阶低通有源滤波电路,对实时阀位信号进行滤波处理。R10与R12都为500k的精密电阻,取其中点电压值PV_REF送入CPU中作基准电压,可提高阀位检测电路的抗干扰性。

图3 阀位检测电路
4 电气转换模块
电气转换单元是智能阀门定位器的核心部件之一,其作用是将主控制器输出的电信号转换成气动信号驱动调节阀阀杆上下移动。该模块的耗电量、抗振性、频率响应及耗气量直接决定整机的相关性能指标。
目前,压电阀式的电气转换单元在智能电气阀门定位器中应用较广泛,因其具有高抗振动性、高可靠性、低功耗、低耗气量和能够接受较高频率的控制信号等特点,非常适合智能阀门定位器对电气转换模块的性能要求。
4.1 压电阀工作原理
压电阀实际是利用功能陶瓷片在电压作用下产生弯曲变形原理制成的一种两位式控制阀[2]。控制压电阀动作只需提供足够的电压,电功耗几乎为零。压电阀(图4)由先导压电阀片、开关功率放大器、微型减压阀和30μm的过滤器组成2位3通阀。图4为压电阀工作原理示意图。
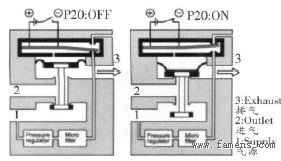
图4 压电阀工作原理示意图
不通电时压缩空气输入孔1封闭,输出孔2和大气孔3相通,输出气压为0;通电时上层晶体收缩,下层晶体伸长,产生杠杆效应,使机械变形可扩大到几十微米,大气孔3封闭,压缩空气由孔1流向孔2,产生输出气压信号,将气体输入调节阀中。这里压电片的通电时间决定调节阀中进气量的大小,从而驱动阀杆移动至不同阀位。
4.2 压电阀驱动电压测试
由于压电阀可在气源压力为1.4~7.0Bar下正常工作,因此本文选择3.0bar的气源压力,现对压电阀提供不同大小的驱动电压,观察阀位变化情况。压电阀在3.0bar的气源压力下,给其提供不同的驱动电压,调节阀的阀位的变化情况如表2所示:
表2 压电阀驱动电压与阀位变化情况
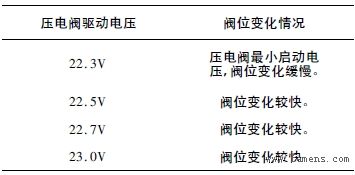
由表2可知:压电阀最小的驱动电压为22.3V,当驱动电压不断增大至22.5V时,压电阀完全跳变,即压电阀驱动电压只要达到22.5V,压电阀就能正常工作。
4.3 压电阀驱动电路设计与测试
由于压电阀中压电片需要达到22.5V或以上电压才能完全发生形变,而本文采用的微处理器LPC2290输出的控制信号是幅值为3.3V的脉宽调制(PWM)信号,脉宽调制信号就是在一定的脉冲周期T内调节开启时间的宽度Ton与脉冲周期T的比值即脉宽占空比τ的大小来达到控制要求。本课题研究中根据脉宽调制作用,通过改变输出信号占空比τ来控制压电阀片的通、断时间,从而控制调节阀阀杆的行程。这里压电阀驱动电路的作用就是将幅值为3.3V的PWM信号转换成幅值为22.5V及以上电压的PWM信号。设计压电阀驱动电路时需根据压电阀的特性来进行设计。表3为压电阀的特性参数[3]。
表3 压电阀特性参数表
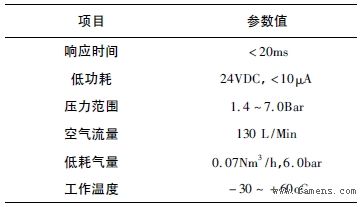
根据压电阀的特性参数,驱动电路需达到以下要求:
(1)完成3.3VPWM信号至24VPWM信号的转换。
(2)驱动电路响应频率应高于50Hz(压电片的响应时间为20ms左右即50Hz,所以驱动电路的频率不应低于压电阀的响应频率)。
(3)压电阀是电容性负载,驱动电路设计时因根据驱动对象进行设计。
本文主控制芯片LPC2290输出的PWM信号高电平为3.3V,低电平最大值为0.4V,因此这里选用N沟道增强型场效应管IRFU120[3]作为功率开关管。其开启电压V(th)为2V,对于增强型场效应管[4],当栅源电压Vgs=3V>V(th)时,若此时有漏源电压Vds,将有漏极电流Id产生,场效应管导通;当栅源电压Vgs<V(th)时,漏极电流Id=0,场效应管截止。该场效应管开启、关闭的时间都是ns级,足以满足压电阀频率响应要求。
方案1:图5是由一个场效应管IRFU120构成的压电阀驱动电路,主控制器输出的PWM控制信号,经功率放大,输出至压电阀接线端子。

图5 方案1压电阀驱动电路
方案1电路分析:当PWM控制信号输出高电平3.3V时,大于场效应管的开启电压V(th)=2V,场效应管导通,C点电压为0,即压电阀驱动端子电压为0;当PWM控制信号输出低电平0.4V时,小于场效应管的开启电压V(th)=2V时,场效应管截止,C点电压为24V。
方案1电路测试结果如表4所示:
表4 方案1电路测试结果
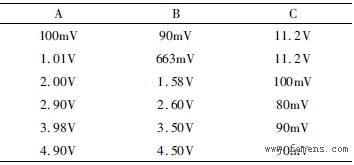
测试结果表明:实际测试效果与理论分析存在一定的差距,当输入电压为低电平时100mV或1.01V,虽然小于场效应管的开启电压V(th),但漏源之间存在微小的电流,使得电流流过R2,损失了一定的压降,导致C点电压达不到24V,因此需对该方案进行改进。图6为电路改进方案:采用两个场效应管串接成功率驱动电路。图中主控制器输出的PWM信号经过场效应管组成的功率放大电路输出至压电阀的接线端子。
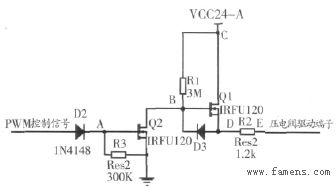
图6 压电阀驱动电路改进方案
改进方案电路测试结果如表5所示:
表5 改进方案电路测试结果
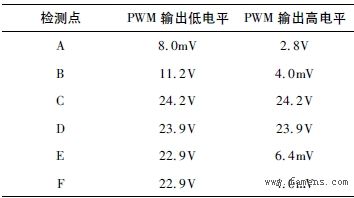
改进方案测试结果表明,该方案能够较好地实现开关效果,当PWM信号输出高电平时,Q2管导通,B点电压被拉低至4.0mV,Q1管截止,压电阀驱动端子输出低电平信号;当PWM信号输出低电平时,Q2管截止,B点电压为11.2V大于该场效应管开启电压V(th),Q1管导通,压电阀接线端子输出高电平。
图7为上图压电阀驱动电路响应效果,测试结果表明该功率驱动电路输出的驱动电压为23V大于压电阀正常工作所需最小电压22.5V,且开关特性较好,可以看出整个驱动电路的延迟时间为7.2ms(要求是小于20ms),驱动电路满足需求。
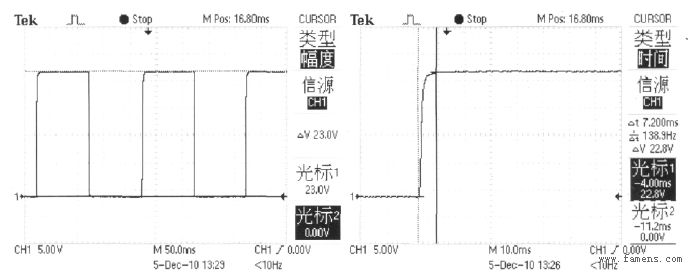
图7 压电阀驱动电路测试结果
5 小结
本文根据传感器的特性,介绍相应的阀位检测电路的设计原理;并针对压电阀的特性,详细介绍压电阀驱动电路设计过程,将两种电路方案进行对比,经理论分析、仿真、实验测试表明方案二更适合压电阀的驱动要求。
参考文献:
[1]OP227Devicedatasheet.AnalogDevicesCorporation.
[2]李东明,孙宝元,王伟.压电结构电气转换装置结构设计与实验研究[J].压电与声光,2008,30(3):2.
[3]康华光,陈大钦.电子技术基础[M].北京:高等教育出版社,2005:199-205.
[4]IRFU120Devicedatasheet.IntersilCorporation.
[5]秦曾煌.电工学[M].北京:高等教育出版社,2003:76-87.
相关新闻
关于我们 - 刊登广告 - 服务项目 - 联系我们 - 会员说明 - 法律声明 - 意见反馈 - 本网动态 - 友情链接 - 企业展示 - 阀门助手
广告热线:0571-88970062 服务热线:0571-56077860 传真:0571-88971936
广告咨询
会员咨询:
客户服务:
友情链接:
客服邮件:service#famens.com 销售邮件:sales#famens.com 投稿邮箱:famens-bj#foxmail.com